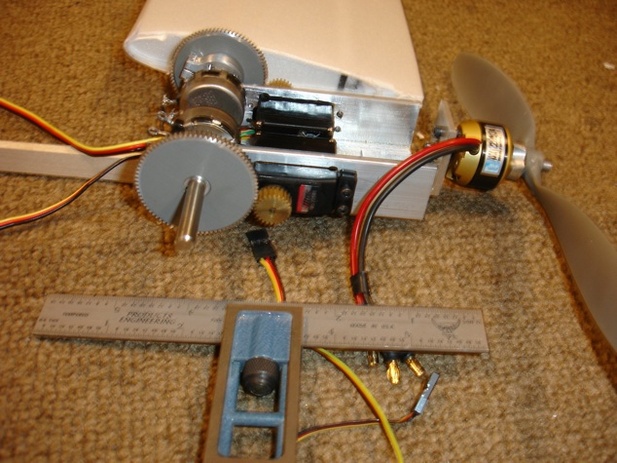
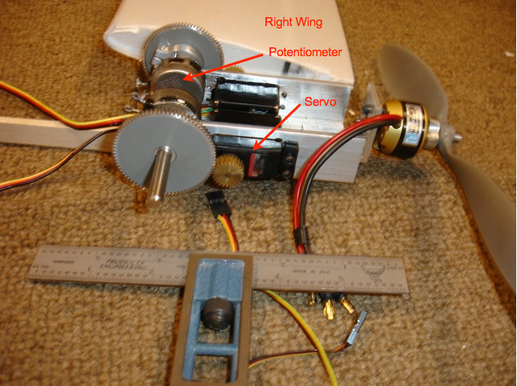
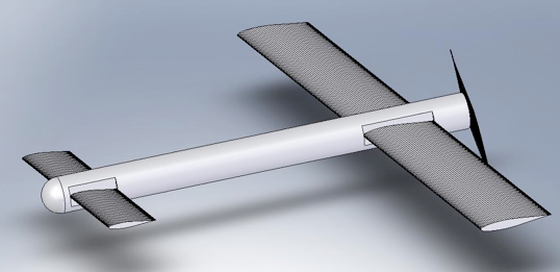
We conducted one flight test today and the results are pleasing and will certainly lead to more testing of the current airframe. The most incredible part of the flight test was that the airplane actually flew in coordinate, controlled, straight, and climbing flight. Due to various design constraints, the airplane has no vertical stabilizer and it is therefore unstable about the yaw axis. A gyroscope, and gyroscope-controlled thrust vectoring were incorporated into the design making coordinated flight possible. That said, it would be impossible for a human to control the airplane without the gyroscope. Additionally it is interesting to note, although not entirely surprising that the airplane was controllable in roll. As previously explained, there are no ailerons on the airplane. Instead, the whole main wings rotate in opposite directions to achieve roll control. I know of no other airplane that controls roll in this manner and we were all pleased to see the airplane fly as well as it did.
The rotoplane was hand launched into the wind from a moving vehicle. It climbed in coordinated, controlled flight to an altitude high enough for an autorotation. At this point the motor was cut and the airplane was set into a roll. This roll merged into a situation where the airplane was spinning about its longitudinal axis, and parallel to the gravity vector as designed.
The pilot then changed the pitch of the wings to a “positive” angle of attack. It is unclear why, but the airplane then reversed its autorotation such that the what was supposed to be the top part was now the bottom. It continued in this nose upward attitude for a brief period without rotating significantly until the controls were adjusted to accomodate an autorotation in this orientation. At this time the airplane began to rotate about an axis through the center of its fuselage although pointed upward.
Without enough altitude left to rectify the situation, the test pilot let the airplane spin up and prepared for the flare at the end of the autorotations. At an altitude of about ten feet he flared. By this point, the airplane was below the tree-line and isn’t as clearly visible as I would have liked. However, it did arrest its descent as is noted by the brief pause only a couple feet off the ground.
This test was a great success for the rotoplane even though it wasn’t a perfect demonstration of the technology being developed. It did demonstrated that an airplane of the rotoplane’s configuration could fly, and that not only could it fly; it can autorotate. Future tests will be conducted with the same airframe in a couple weeks once I have time again.
Future work includes gathering data from the autorotation such as rotational rates, wing angle and descent rate. In order to accomplish this I would like to install electronic sensors. I am in the process of learning to program microcontrollers. I eventually hope to install some custom made data loggers in the airplane to gather data during autorotations.
The rotoplane was hand launched into the wind from a moving vehicle. It climbed in coordinated, controlled flight to an altitude high enough for an autorotation. At this point the motor was cut and the airplane was set into a roll. This roll merged into a situation where the airplane was spinning about its longitudinal axis, and parallel to the gravity vector as designed.
The pilot then changed the pitch of the wings to a “positive” angle of attack. It is unclear why, but the airplane then reversed its autorotation such that the what was supposed to be the top part was now the bottom. It continued in this nose upward attitude for a brief period without rotating significantly until the controls were adjusted to accomodate an autorotation in this orientation. At this time the airplane began to rotate about an axis through the center of its fuselage although pointed upward.
Without enough altitude left to rectify the situation, the test pilot let the airplane spin up and prepared for the flare at the end of the autorotations. At an altitude of about ten feet he flared. By this point, the airplane was below the tree-line and isn’t as clearly visible as I would have liked. However, it did arrest its descent as is noted by the brief pause only a couple feet off the ground.
This test was a great success for the rotoplane even though it wasn’t a perfect demonstration of the technology being developed. It did demonstrated that an airplane of the rotoplane’s configuration could fly, and that not only could it fly; it can autorotate. Future tests will be conducted with the same airframe in a couple weeks once I have time again.
Future work includes gathering data from the autorotation such as rotational rates, wing angle and descent rate. In order to accomplish this I would like to install electronic sensors. I am in the process of learning to program microcontrollers. I eventually hope to install some custom made data loggers in the airplane to gather data during autorotations.
I would like to thank William Grossman (UC Berkeley) who flew the airplane for all test flights from the very beginning of the project. I would also like to thank Cedric Jeanty (Caltech) for all the useful ideas and advice during the design and construction of the airplane. I would also like to thank professor Culick for his help and guidance along the way and Caltech for having a senior thesis program. Finally I would like to thank my cousin Beth for filming.

 RSS Feed
RSS Feed
