
High Altitude Rockies just southwest of Denver, CO.
The company I work for (eSolar) sent me to AUVSI in Denver, CO to have a look at the developers of unmanned ground vehicles. Why would they do something so awesome? Well, I designed and built the autonomous cleaning vehicles for the eSolar demo power plant in Lancaster, CA. Now we’re moving past demo and prototype and we want someone to build a better one. Our expertise at eSolar is heliostats and the software that makes our fields work. We don’t really want to be in the mirror cleaning business, but we need someone to be in that business so that they can keep our mirrors clean.

Beginnings of the Grand Canyon. The muddy little river at the bottom is the mighty Colorado.
At AUVSI, I met with various manufacturers of robotic vehicles. They all had interesting stuff, but quite frankly, the component-level hardware that was at the show was just as interesting as the vehicles themselves. I finally saw a harmonic drive in operation, I got to chat with a manufacturer of miniature turbine engines and ask him detailed questions regarding their operation, I saw a nutating engine, and I saw more AHRS’s (Altitude Heading Reference System) than you could shake a stick at.
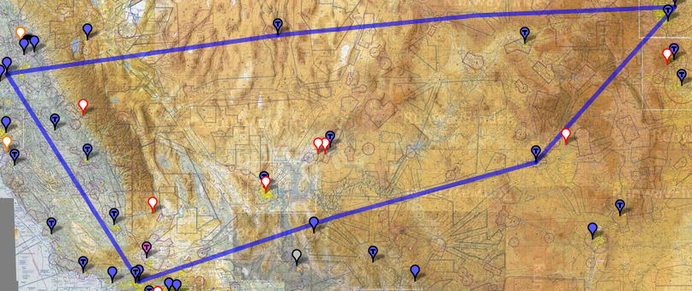
Anyhow, the most interesting part of the trip was not the show, it was the flight out there and back. Instead of flying Southwest, I decided to fly my RV-6... that you’re pretty well acquainted with by now. On Monday August 24th after work I flew to Davis (EDU) to see my girlfriend and mom. Then early on Tuesday I took off from EDU headed for Ely, Nevada (ELY). At Ely the engine ran a little rough during my taxi to the fuel pit after landing. When I went to kill the engine by leaning the mixture it didn’t die in the usual way but kept rumbling on for a bit. Finally it quit and I got out.
Anyhow, the most interesting part of the trip was not the show, it was the flight out there and back. Instead of flying Southwest, I decided to fly my RV-6... that you’re pretty well acquainted with by now. On Monday August 24th after work I flew to Davis (EDU) to see my girlfriend and mom. Then early on Tuesday I took off from EDU headed for Ely, Nevada (ELY). At Ely the engine ran a little rough during my taxi to the fuel pit after landing. When I went to kill the engine by leaning the mixture it didn’t die in the usual way but kept rumbling on for a bit. Finally it quit and I got out.

Overdeveloped cumulous cloud over Barstow, CA.
I took the top cowling off to see if I couldn’t have a look at things, but the mixture adjustment is on the carb which is under the engine and having the top cowling off didn’t help me much. I reached in through the gap between the cowling and the airplane to see if I couldn’t tug on the mixture lever and see if it was loose. It wasn’t. I chatted with a buddy and decided that maybe our engine was just adjusted a bit rich and because of that I may have trouble shutting it off at high altitude.
I bought gas, did an extremely thorough run-up and took off toward Denver. The flight went quite smoothly until on landing, the engine started mis-behaving again. Again, I couldn’t quite stop the engine using only the mixture knob so I grounded the mags to kill it. It died, less gracefully than usual but it did die. I hopped out of the airplane and scurried off to the conference.
I didn’t think much more about things until it was time to fly back. Again, I performed a very through run up and the engine ran great t all throttle settings except idle. I decided that idle was the least important of the power settings and took off. I flew from Denver (APA) to Four Corners (FMN) and then from FMN to Whiteman, CA (APA).
I bought gas, did an extremely thorough run-up and took off toward Denver. The flight went quite smoothly until on landing, the engine started mis-behaving again. Again, I couldn’t quite stop the engine using only the mixture knob so I grounded the mags to kill it. It died, less gracefully than usual but it did die. I hopped out of the airplane and scurried off to the conference.
I didn’t think much more about things until it was time to fly back. Again, I performed a very through run up and the engine ran great t all throttle settings except idle. I decided that idle was the least important of the power settings and took off. I flew from Denver (APA) to Four Corners (FMN) and then from FMN to Whiteman, CA (APA).

Rain storms on the north slopes of the San Gabriels as viewed from above Palmdale, CA.
Shortly after leaving FMN I flew over the Grand Canyon by veering slightly off course to the north. The Grand Canyon is truly spectacular and I only wish that the pictures could do it justice. Unfortunately I have a bubble canopy and no picture through it is much good.
As I was flying over the Grand Canyon, I began trying to use the autopilot system that we had built for the RV. As you know it runs on an EEE-PC running some Matlab code we wrote. Unfortunately, every time I engaged the altitude hold, the autopilot would try to point the plane straight at the ground. Needless to say there we some bugs in the code. I started sifting through the bugs with the stick between my knees and in about 10 minutes I had the code working properly.
Between the Grand Canyon and Bullhead City, I was able to do some gain tuning, and with quite a bit of derivative gain, some proportional, and nearly zero integral I was able to stabilize the autopilot to some degree. It wasn’t perfect but it wasn’t so bad for a first step. All that was really missing was a low pass filter on the barometric pressure input. For some reason, spikes would appear on the barometric pressure input and these would cause the derivative error signal to spike. Needless to say this made the flight somewhat rough so I quickly coded up a running average filter and it smoothed things out quite a bit.
As I was passing the Grand Canyon and coding, I could already see cumulous clouds building on my route toward LA. I contacted ATC to see if they could inform me on where the weather was. Fortunately, the cumulous clouds were all on the San Gabriel’s just south of my route. I continued toward LA until the clouds were just off my left wing tip. Finally, as I was just south of Palmdale I noticed giant columns of precipitation and lightning. It was quite stunning. I kept trying to capture pictures of the lightning, but without a light activated shutter, or really long exposures, it’s nearly impossible to capture lightning.
As I was flying over the Grand Canyon, I began trying to use the autopilot system that we had built for the RV. As you know it runs on an EEE-PC running some Matlab code we wrote. Unfortunately, every time I engaged the altitude hold, the autopilot would try to point the plane straight at the ground. Needless to say there we some bugs in the code. I started sifting through the bugs with the stick between my knees and in about 10 minutes I had the code working properly.
Between the Grand Canyon and Bullhead City, I was able to do some gain tuning, and with quite a bit of derivative gain, some proportional, and nearly zero integral I was able to stabilize the autopilot to some degree. It wasn’t perfect but it wasn’t so bad for a first step. All that was really missing was a low pass filter on the barometric pressure input. For some reason, spikes would appear on the barometric pressure input and these would cause the derivative error signal to spike. Needless to say this made the flight somewhat rough so I quickly coded up a running average filter and it smoothed things out quite a bit.
As I was passing the Grand Canyon and coding, I could already see cumulous clouds building on my route toward LA. I contacted ATC to see if they could inform me on where the weather was. Fortunately, the cumulous clouds were all on the San Gabriel’s just south of my route. I continued toward LA until the clouds were just off my left wing tip. Finally, as I was just south of Palmdale I noticed giant columns of precipitation and lightning. It was quite stunning. I kept trying to capture pictures of the lightning, but without a light activated shutter, or really long exposures, it’s nearly impossible to capture lightning.


 RSS Feed
RSS Feed
